Dynamique
De la cinématique à la dynamique
Cinématique
Dynamique
La théorie newtonienne de la dynamique se résume à trois lois du mouvement, ainsi qu'aux définitions des concepts de force et de masse.
Forces
Concept de force
Définition
On peut définir une force résultante comme toute action qui modifie la vitesse d'une particule.
Si la résultante est nulle, une force isolée peut être définie comme toute action qui équilibre les autres forces présentes.
Effets de forces
Une force est une interaction entre deux objets. Il est impossible de pousser un objet sans qu'il pousse lui même contre nous.
La force est un concept, il est donc impossible de la voir. On peut toutefois observer et ressentir les effets que nous lui attribuons.
- Une force peut équilibrer d'autre forces ou modifier la vitesse d'une particule.
- Une force provoque presque toujours une déformation. Elle alors être momentanée ou permanente.
Au niveau macroscopique, on distingue deux types de forces :
- les forces de contact (frottements, contraintes)
- les actions à distances (gravité, force électrique, ...)
Quelques forces courantes et mesure
Voici une liste des principales forces macroscopiques que nous rencontrerons dans ce cours :
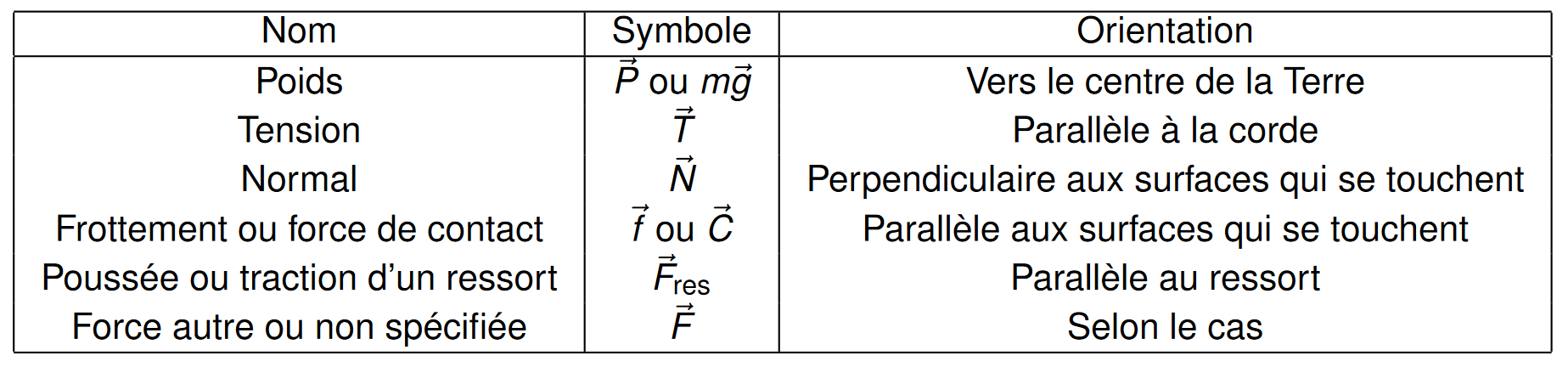
- Le poids est le nom donné à la force gravitationnelle exercée par la Terre sur les objets situés près de sa surface.
- La tension d'une corde est la force de traction exercée par chaque partie de la corde sur les parties voisines et par les extrémités de la corde sur les objets qui y sont attachés.
- La force normale est la force qui empêche deux objets de contact de s'interpénétrer.
- On essaiera de faire la distinction entre le frottement qui est la force qui ralenti deux objets qui glissent l'un contre l'autre ou qui empêche le mouvement d'un objet et la force de contact qui accélère des objets posées sur un camion ou tapis roulant par exemple.
- La force exercée par un ressort vaut
Représentation vectorielle d'une force
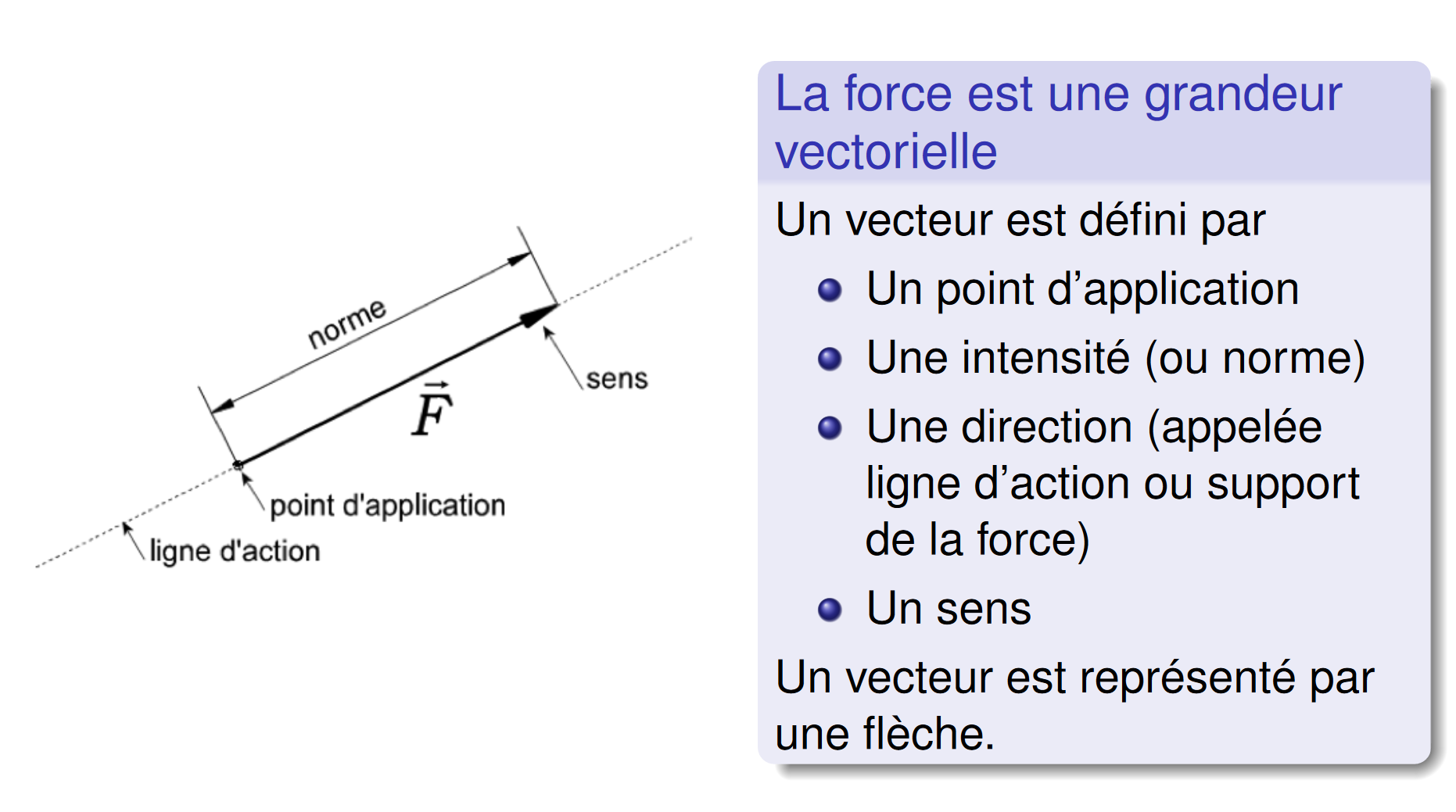
Types de vecteurs
- Vecteur lié (fixe) : vecteur associé à son point d'application
- Vecteur glissant : vecteur dont l'action n'est pas modifiée si on le déplace sur sa ligne d'action. Ce vecteur est lié à une droite (la ligne d'action)
- Vecteur libre : vecteur sans point d'application défini ou avec un point d'application sans importance car ne modifiant en rien l'action de celui-ci.
Les forces sont en général représentées par des vecteurs liés. Dans le cas du solide indéformable en statique, les vecteurs sont des vecteurs glissants.
Implication : une force peut être librement déplacée sur sa ligne d'action.
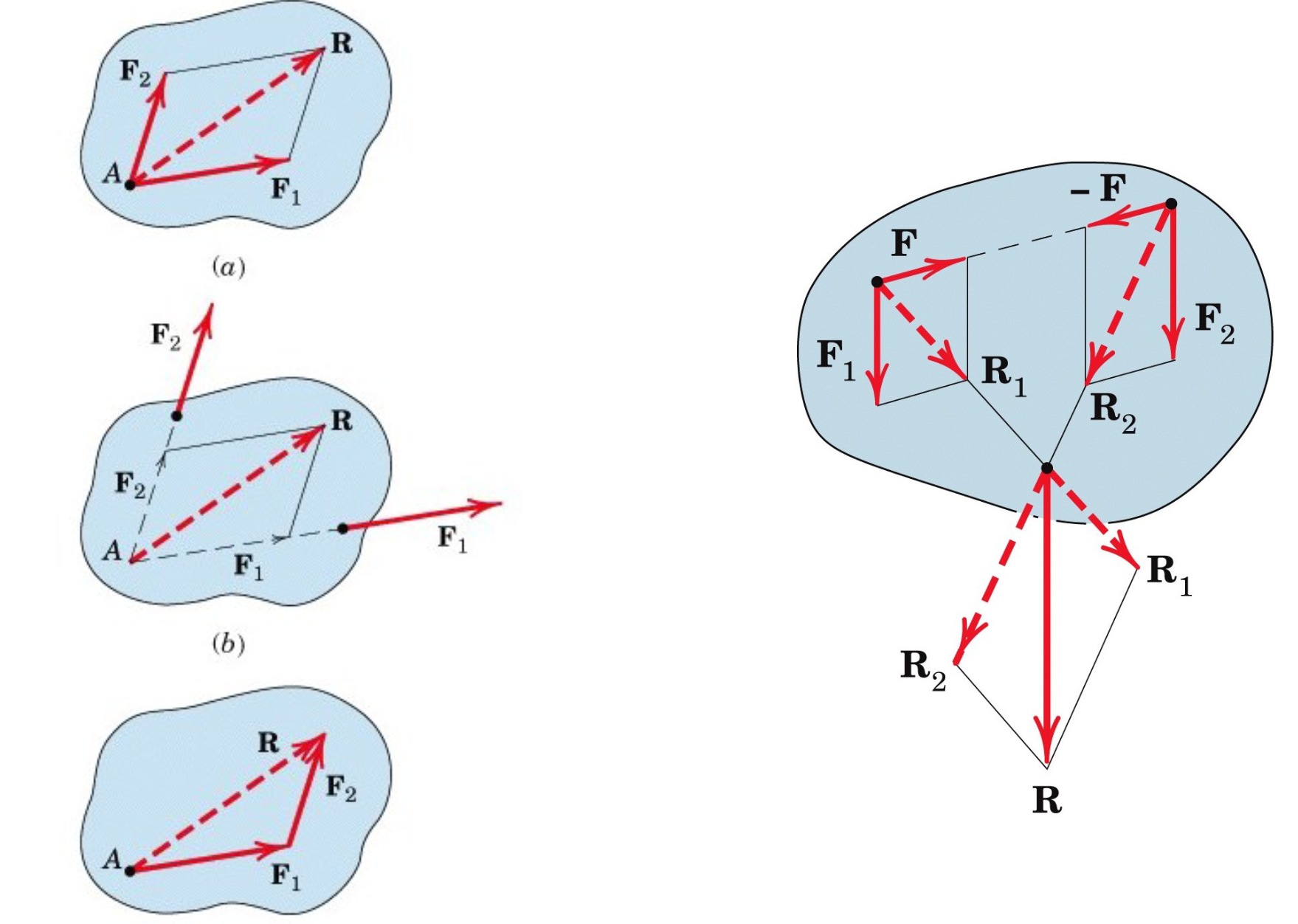
Résultante de deux forces
Masse
Newton a défini la masse comme étant "la quantité de matière" d'un corps. C'est intuitif mais difficile à utiliser.
La deuxième loi de Newton permet de donner une meilleure définition :
Définition
La masse d'un corps est la mesure de son inertie, c'est-à-dire de sa résistance aux variations de vitesse.
2e loi de Newton
La première loi de Newton indique qu'une force induit un changement de vitesse.
En faisant varier
En faisant varier
Ainsi,
Deuxième loi de Newton
La force résultante
Poids
La loi de la gravitation universelle fu énoncée par Newton en 1687 dans le but d'expliquer le mouvement des planètes et la chute des corps à la surface de la Terre.
Loi de la gravitation universelle
Deux objets de masse
Où
Poids (2)
Le poids d'un objet est donc la force gravitationnelle que le corps céleste le plus proche, habituellement la Terre, exerce sur lui.
La loi de la gravitation appliquée au poids devient donc :
Où
On écrit généralement cette équation sous la forme vectorielle suivante :
Poids à la surface de la Terre
Où
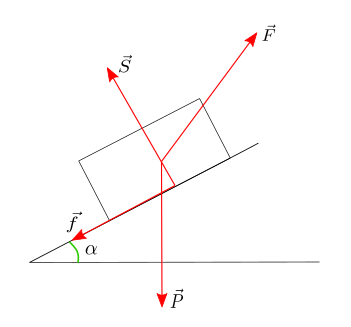
Exemple : plan incliné
3e loi de Newton
On sait qu'une force est une interaction. Elle est exercée par un corps sur un autre.
Notation :
Troisième loi de Newton
Les forces que les objets A et B exercent l'un sur l'autre sont de même module et de sens opposés.
A chaque force correspond toujours une force réciproque. Ceci est valable pour toutes les forces, de contact ou à distance, ainsi qu'à chaque instant, que les objets accélèrent ou non.
Les paires de forces action-réaction s'exercent sur des objets différents.
Méthode de résolution
Faire un schéma de la situation physique et identifier l'objet auquel on s'intéresse
Représenter toutes les forces agissant sur le corps par des objets extérieurs
Choisir un système de coordonnées approprié
Faire un bilan des forces grâce à la 2e loi de Newton :
S'il y a plusieurs corps différents, identifier les paires action-réaction et appliquer la 3e loi de Newton
Vérifier la plausibilité des résultats.
Situations d'équilibre
Lorsque la somme des forces s'exerçant sur une particule est nulle, on dit qu'elle est en équilibre de translation.
Si la particule est au repos, elle est en équilibre statique.
Si elle est en mouvement à vitesse constante, elle est en équilibre dynamique.
Dans tous les cas, on a :
Situations hors équilibre
Lorsque la somme des forces agissant sur une particule est non-nulle, les objets accélèrent.
La méthode de résolution est la même mais la résultante des force n'est plus nulle :
Frottements
Considérations générales
Le frottement est une force de contact qui s'oppose au mouvement relatif de deux objet.
En 1508, Léonard de Vinci découvrit que :
- La force de frottement est proportionnelle à la charge
- La force de frottement est indépendante de l'aire de contact.
En 1699, Guillaume Amontons fit les mêmes découvertes, ainsi qu'une troisième :
- La force de frottement est indépendante de la vitesse.
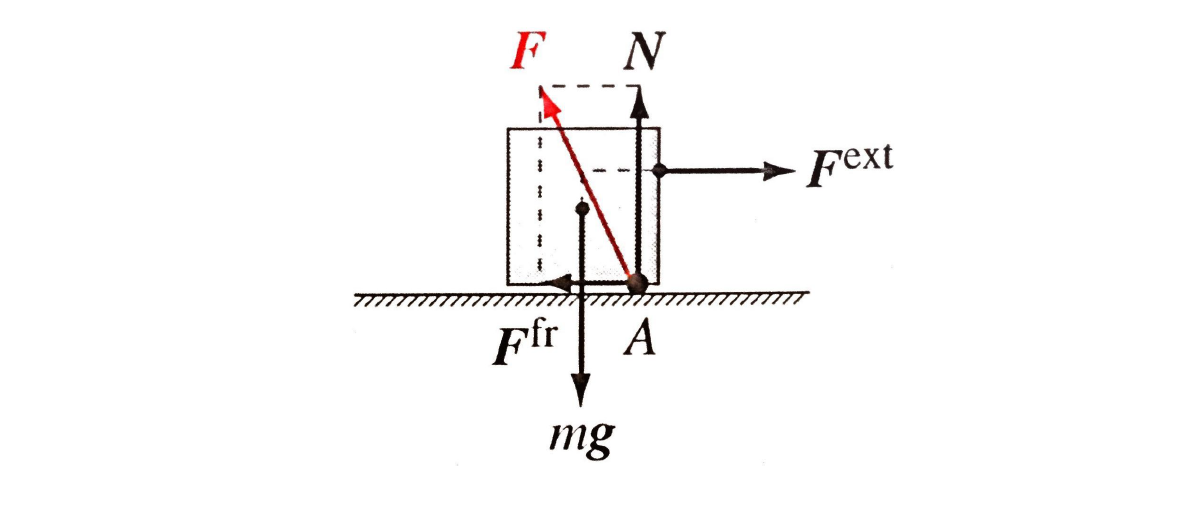
Force de frottement sec
Le frottement sec représente l'action d'une surface rigide sur un solide, action qui s'oppose au mouvement du solide par rapport à la surface.
Définition
- La composante de
- La composante de
Cas statique
Dans un cas statique où le corps est immobile, la force de frottement s'adapte pour annuler l'action des autres forces qui lui sont parallèles.
Vecteur force de frottement en 2D
- Le point d'application se situe quelque part sur la surface de contact
- Sa direction est tangente à la surface au point de contact
- son intensité est variable
Intensité
L'intensité de la force de frottement est variable mais a une valeur maximale
Effet de seuil
Lorsque la force de frottement dépasse sa valeur seuil
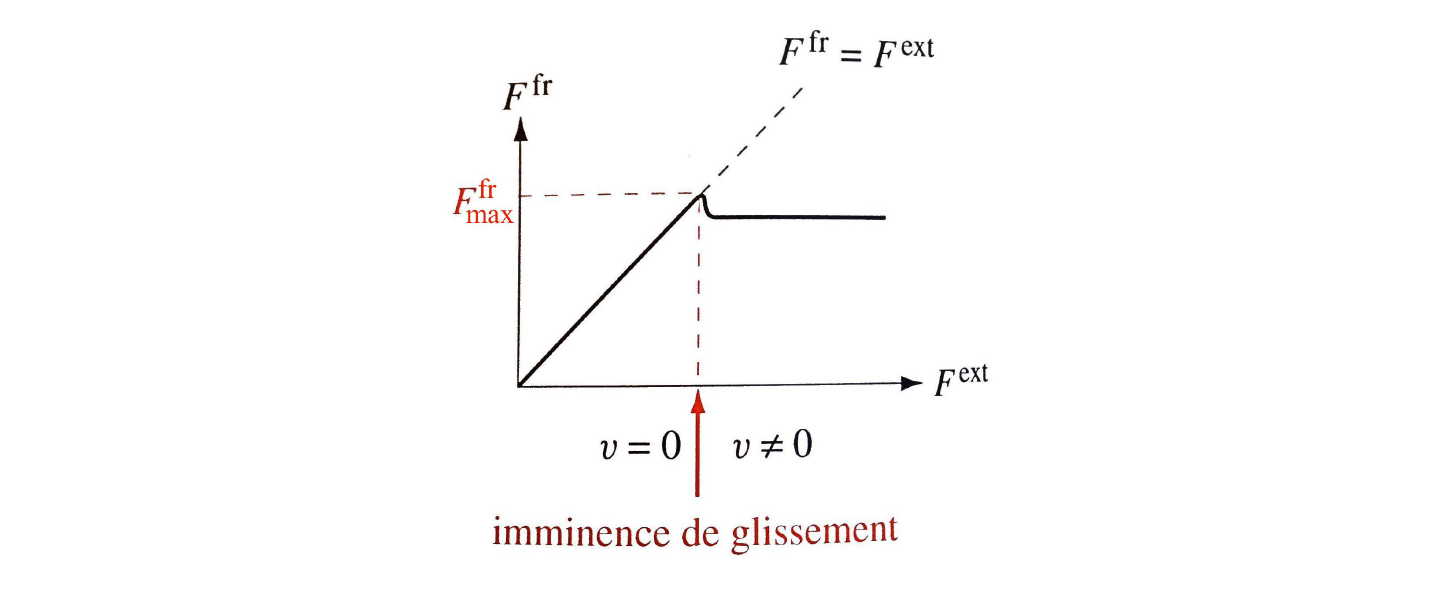
Intensité
L'intensité de la force de frottement sec lorsque l'objet est mobile est alors fixe et vaut :
Où
Cas dynamique
Vecteur force de frottement
Dans les deux cas suivants :
- Cas dynamique (
- Cas statique où un corps est mobile (
La force de frottement sec peut alors s'exprimer entièrement par
Dynamique du mouvement circulaire uniforme
Pour les mouvements rectilignes, le vecteur accélération est parallèle au vecteur vitesse (de même sens ou sens opposé).
Dans un mouvement en deux dimensions, l'accélération peut avoir à la fois une composante tangentielle et une composante normale à la vitesse.
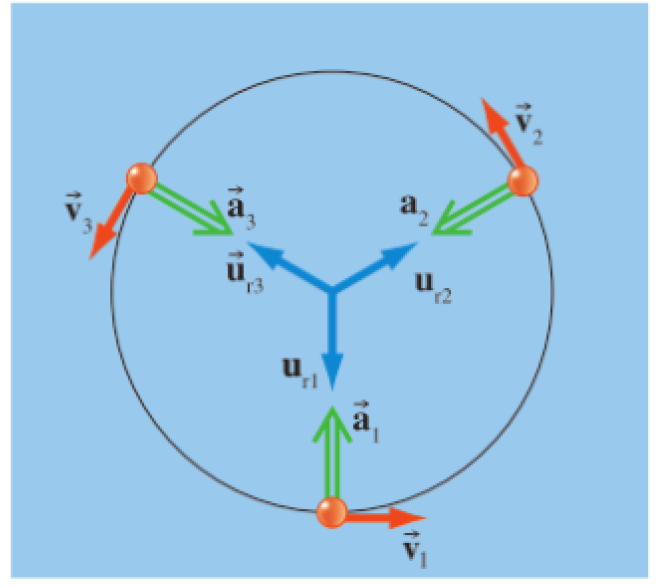
Dans le mouvement circulaire uniforme : l'accélération est purement normale à la vitesse et de module constant.
Accélération centripète
L'accélération centripète est toujours orientée de façon radiale vers le centre du cercle de la trajectoire.
Force centripète
Dynamique du mouvement circulaire non uniforme
Vitesse n'est pas de module constant mais change de direction et de module, l'accélération peut alors être décomposée en une composante tangentielle et une composante centripète (ou normale).
Accélération d'un mouvement circulaire non uniforme
Le premier terme est nommé accélération tangentielle et le deuxième est appelé accélération normale.