CinématiqueMouvementModélisationDéplacementDistance parcourueexempleVitesse moyenneVitesse instantanéeAccélération moyenneAccélération instantanéeUtilisation des airesRègle de Mertonéquation de la vitesse équation de la positionPosition dans l'espacePositionDéplacementTrajectoireVitesse dans l'espaceVitesse moyenneVitesse instantanée Accélération dans l'espaceAccélération moyenneAccélération instantanéeEquation de la cinématique à accélération constanteEquation de la vitesseEquation de la positionMouvement circulaire uniformeAccélération centripèteAccélération centripète vectoriellePériodeMouvement circulaire non-uniformeRepère n-tVitesse et accélération dans le repère n-tVitesseAccélération
Cinématique
Mouvement
La cinématique consiste à décrire la manière dont un objet se déplace dans l'espace et le temps, sans se préoccuper des causes de ce mouvement.
Modélisation
Dans ce chapitre, on va modéliser le mouvement comme s'il était rectiligne → translation
Comme on néglige la rotation, on peut décrire le mouvement de tout objet comme le mouvement d'un seul point.
→ on considère l'objet comme une particule.
Cela ne fonctionne que si la taille, la forme et la structure de l'objet n'importe pas.
Déplacement
Le déplacement est défini comme une différence de deux positions :
où
Si on ne considère qu'une seule dimension, on peut alors écrire :
Distance parcourue
La distance parcourue est le trajet réel effectué par l'objet, c'est donc un scalaire positif
exemple
Vitesse moyenne
On considère un objet qui effectue un déplacement
On définit alors la vitesse moyenne comme étant :
La vitesse scalaire quant à elle est le rapport de la distance parcourue sur le temps :
Vitesse instantanée
La vitesse instantanée est la vitesse d'un objet à un temps
Son expression est donnée par :
Accélération moyenne
L'expression de l'accélération moyenne est donnée par :
Accélération instantanée
Comme pour la vitesse instantanée, l'accélération instantanée est la valeur de l'accélération à un temps
Son expression est donnée par :
Utilisation des aires
Selon les définitions précédentes, on peut définir la formule suivante :
Cela implique que l'aire sous le graphe de la vitesse nous donne la différence de position (mais pas la position elle-même!)
De la même manière on a pour l'accélération :
L'aire sous le graphe de l'accélération nous donne bien la différence de vitesse.
Règle de Merton
On considère :
On pose alors :
équation de la vitesse
équation de la position
Position dans l'espace
Avec une seule dimension, la position était définie par un scalaire
Position
Déplacement
Trajectoire
La trajectoire est une succession de positions
Vitesse dans l'espace
Vitesse moyenne
Vitesse instantanée
Accélération dans l'espace
Accélération moyenne
Accélération instantanée
Un vecteur accélération peut change la direction de
Equation de la cinématique à accélération constante
Equation de la vitesse
Equation de la position
Mouvement circulaire uniforme
Dans un MCU, la norme de la vitesse est constant.
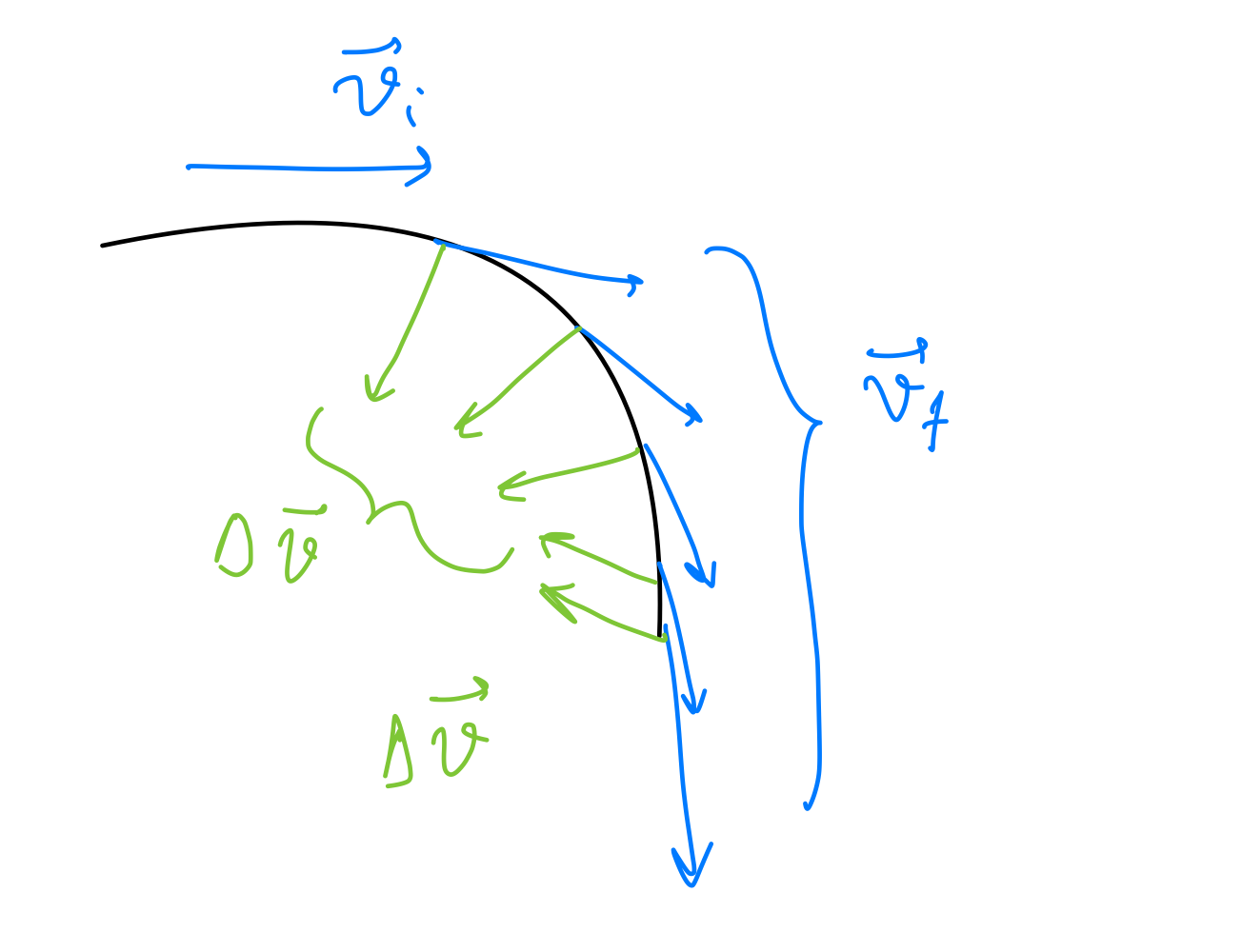
l'accélération dirigée vers le centre du cercle est appelée l'accélération centripète.
C'est une accélération instantanée.
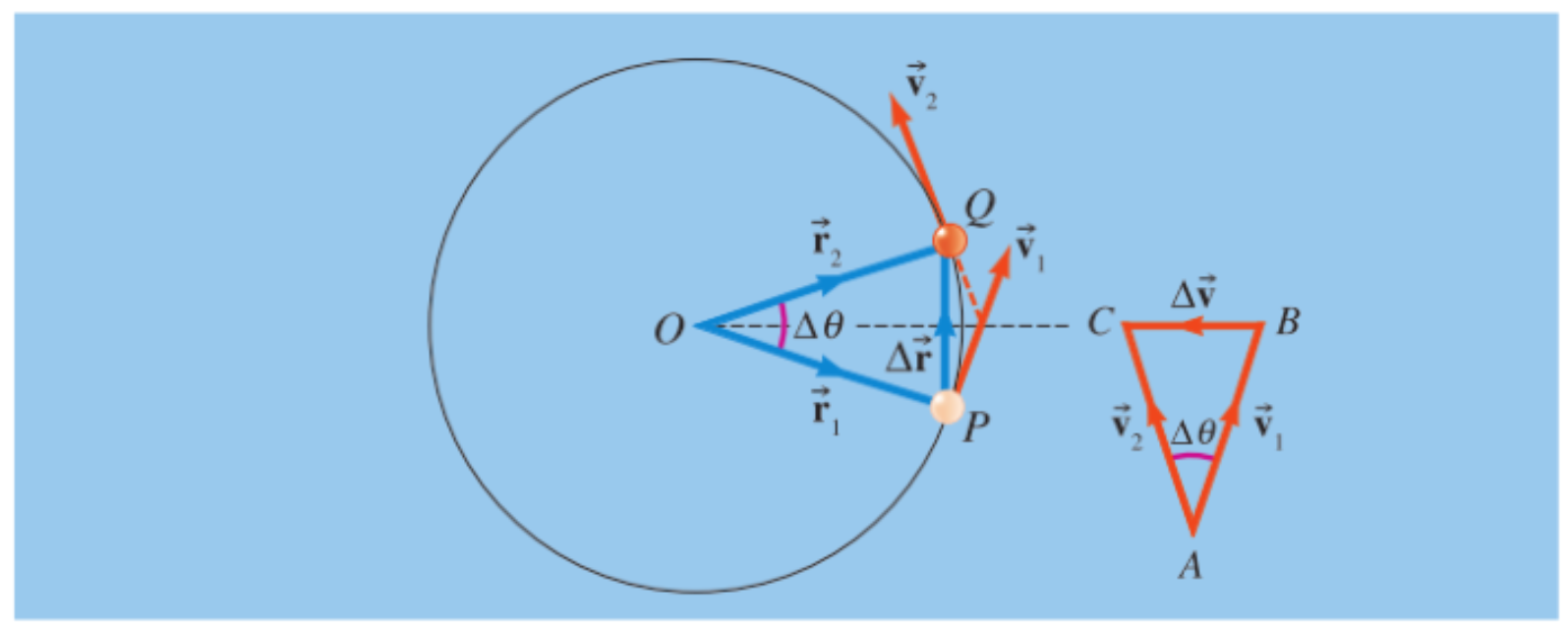
Une particule se déplaçant sur un cercle de rayon
On voit que
Si
L'arc de cercle se confond alors avec la sécante qui correspond au déplacement
Accélération centripète
Accélération centripète vectorielle
Période
La période
La distance pour parcourir un tour complet est donc
On en déduit que la période vaut :
On peut alors en déduire une nouvelle expression pour la vitesse :
Mouvement circulaire non-uniforme
Comme on l'a vu plus tôt, une accélération, en plus de pouvoir être une variation de direction de la vitesse, elle peut aussi être une variation de sa norme.
Cette variation de la norme de la vitesse est appelée accélération tangentielle.
Sur un trajectoire généralisée, la vitesse peut tant varier en module qu'en orientation. C'est ce qu'on appelle le mouvement circulaire non-uniforme.
Repère n-t
Au lieu d'utiliser un repère cartésien, on va utiliser un repère normal-tangentiel, qui varie le long de la trajectoire mais dont le vecteur
Le vecteur
Vitesse et accélération dans le repère n-t
Vitesse
Dans le repère n-t, la vitesse s'exprime par :
où
Accélération
Dans le repère n-t, l'accélération s'exprime par :
où