Chapitre 1- Trigonométrie
Chapitre 1- Trigonométrie1.0 Introduction1.1 AnglesDéfinition1.1.1 Mesure d'un angleSens d'un angleComment mesurer un angleSolution 1Degrés, minutes, secondesSolution 21.1.2 Vitesse angulaire1.2 Théorèmes fondamentaux1.2.1 Triangles homothétiques1.2.2 Théorème de ThalèsConséquences1.2.3 Théorème de Pythagore1.3 Cercle trigonométrique1.3.1 Définitions fondamentales1.3.2 Rapports trigonométriques1.3.3 Angles particuliers1.4 Fonctions trigonométriques1.4.1 Fonction sinusa. Périodicitéb. Paritéc.1.4.2 Fonction cosinusa) Périodicitéb) Paritéc)1.4.3 Fonction tangentea) Périodicitéb) Paritéc)1.4.4 Passage sinus ↔ cosinus1.5 Fonction trigonométriques inverses1.5.1 Fonction sinus inverse1.5.2 Fonction cosinus inverse1.5.3 Fonction tangente inverse1.6 Fonctions trigonométriques généralisées1.6.1 Dilatation et compression verticale1.6.2 Dilatation et compression horizontale1.6.3 Translation verticale 1.6.4 Translation horizontale1.6.5 Définition générale / nomenclature1.7 Equations trigonométriques1.7.1 Equation de baseEquation du type
1.0 Introduction
1.1 Angles
Définition
Deux segments de droites issus d'un même sommet
1.1.1 Mesure d'un angle
On lie la mesure d'un angle à la rotation du côté initial
Il faudra alors préciser deux grandeurs :
- Dans quel sens on tourne
- De combien on tourne
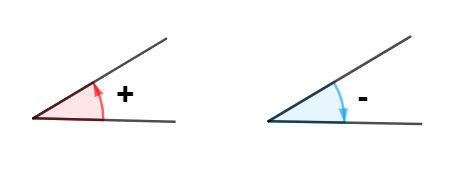
Sens d'un angle
Par convention, une rotation dans le sens :
- antihoraire est positive
- horaire est négative
Comment mesurer un angle
La mesure d'un angle consiste à préciser de combien on va tourner pour passer du côté initial au côté final.
Il y a alors deux solutions possibles :
Solution 1
On décrète que :
- Un tour complet vaut 360 unités d'angles
- Une unité d'angle est appelée degré et on la note (°)
Degrés, minutes, secondes
Au lieu d'exprimer les degrés à l'aide de nombres réels (p. ex
Solution 2
Il est possible de mesure la rotation, donc l'angle, par la longueur de l'arc de cercle décrit par le point
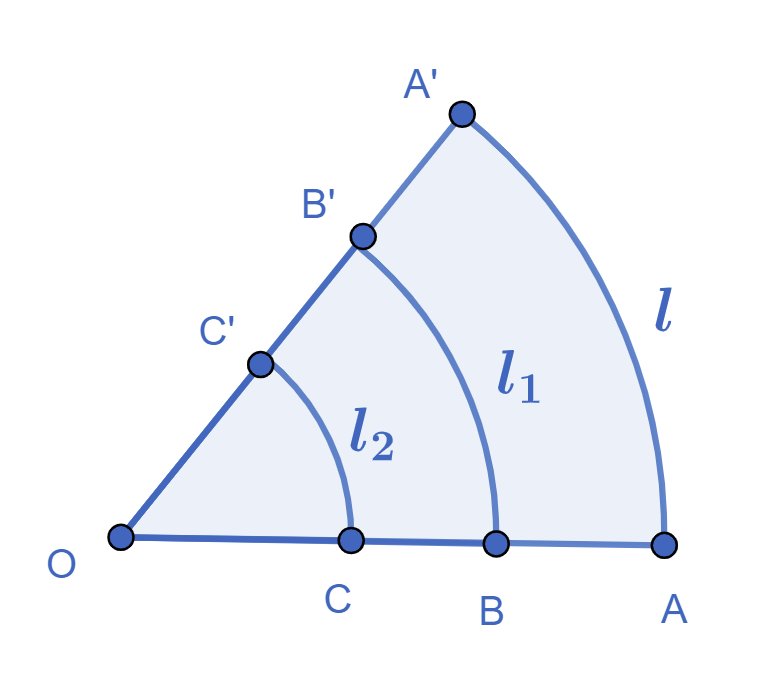
Mais telle quelle, cette solution donne des mesures différentes pour une même rotation. On remarque toutefois que les longueurs d'arc sont proportionnelles à la distance qui sépare le point de départ au sommet :
On nomme ces "unités" d'angles, des radians même si en réalité ce ne sont pas des unités mais bien un rapport de longueurs.
On peut simplement passer d'une unité à l'autre en sachant qu'un tour complet vaut
La mesure d'un angle en radians correspond à l'arc mesuré le long d'un cercle de rayon
1.1.2 Vitesse angulaire
Soit un disque tournant autour de son centre
On représente alors le segment
Ce segment a tourné d'un angle
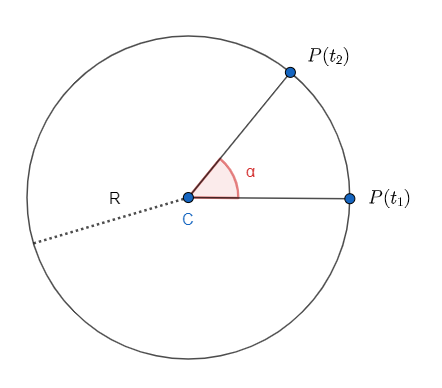
La vitesse du point
Tous les points n'ont donc pas la même vitesse mais le rapport entre la vitesse du point et sa distance au centre est égal pour tous les points le long de la même droite.
On définit alors la vitesse angulaire
1.2 Théorèmes fondamentaux
1.2.1 Triangles homothétiques
Les triangles homothétiques, aussi appelés triangles semblables, sont des triangles de même forme mais de dimension différente.
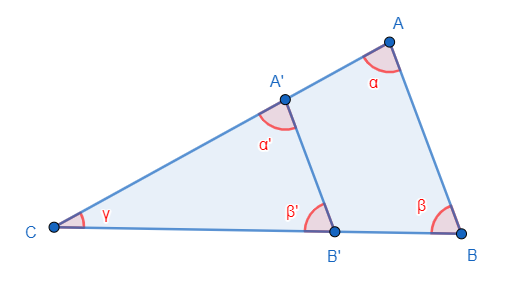
1.2.2 Théorème de Thalès
Si
Conséquences
Il existe un facteur de dilatation
Les angles sont conservés
1.2.3 Théorème de Pythagore
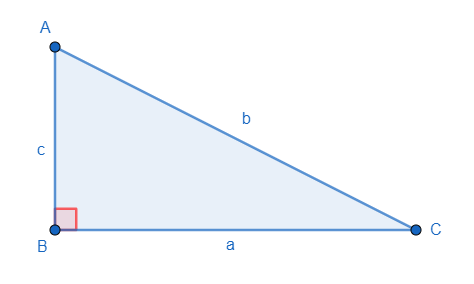
Soit un triangle
1.3 Cercle trigonométrique
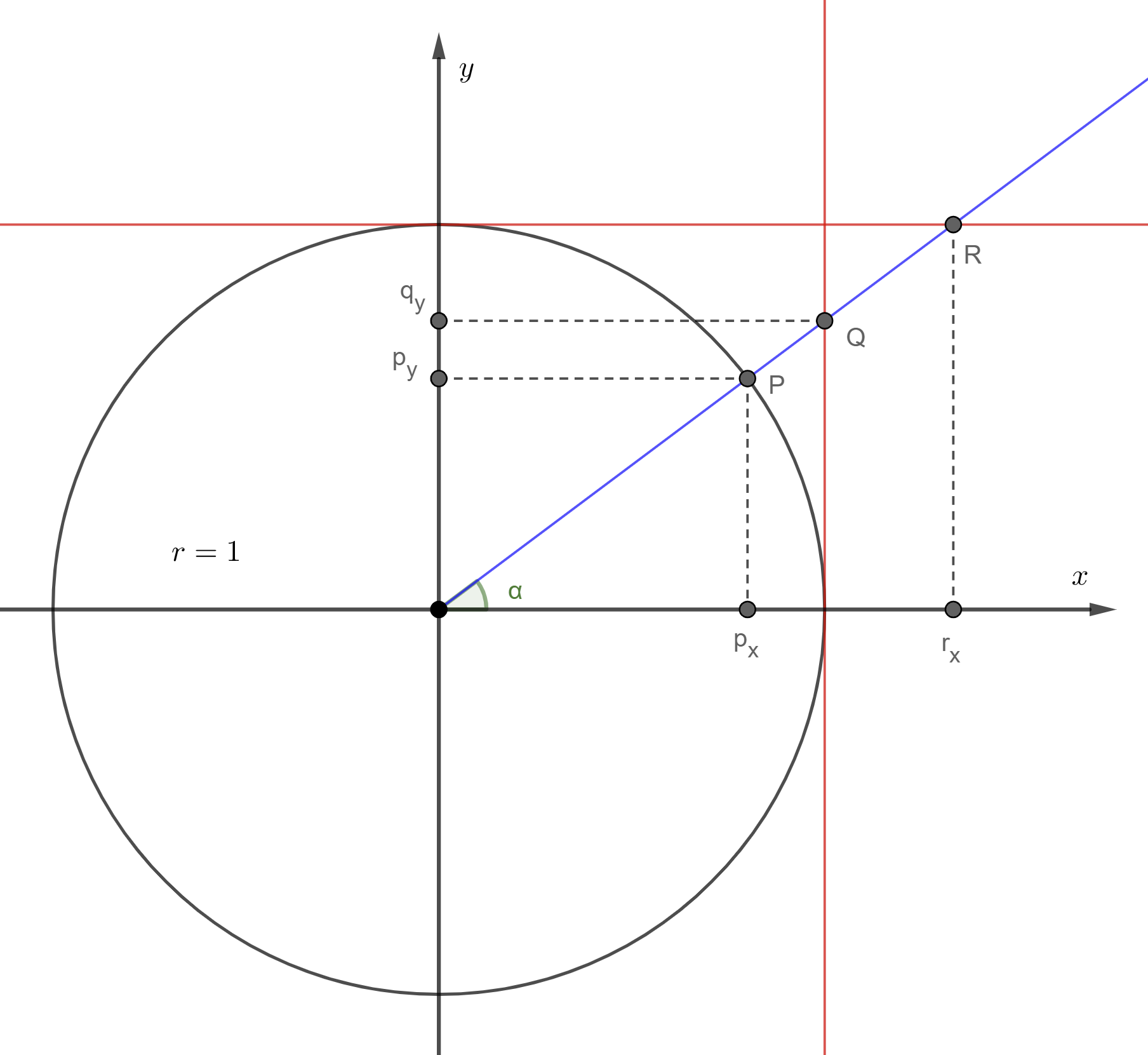
1.3.1 Définitions fondamentales
Sur le côté final de l'angle
Où on appelle
Où on appelle
Où on appelle
1.3.2 Rapports trigonométriques
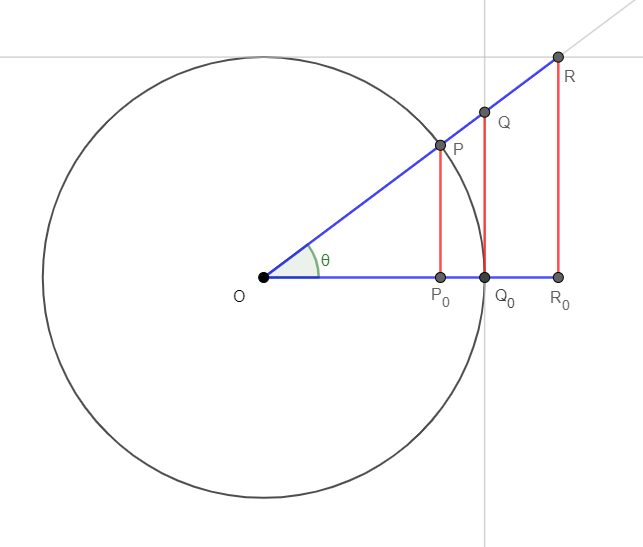
Grâce au théorème de Thalès, on peut trouver les coordonnées de tous les points des deux triangles rectangles semblables :
| 1 | 2 | 3 |
|---|---|---|
De plus, grâce aux théorèmes de Thalès et de Pythagore, on a obtenu les rapports trigonométriques suivants :
1.3.3 Angles particuliers
Pour certains angles particuliers, il est possible de donner la valeur exacte de leur sinus, cosinus et tangente.
Ces angles sont :
1.4 Fonctions trigonométriques
Jusqu'ici nous avons considérés le sinus, le cosinus et la tangente comme des définitions géométriques. A présent, nous allons les regarder comme des fonctions.
On va établir une relation de correspondance entre la valeur de l'angle et celle du sinus, du cosinus et de la tangeante.
1.4.1 Fonction sinus
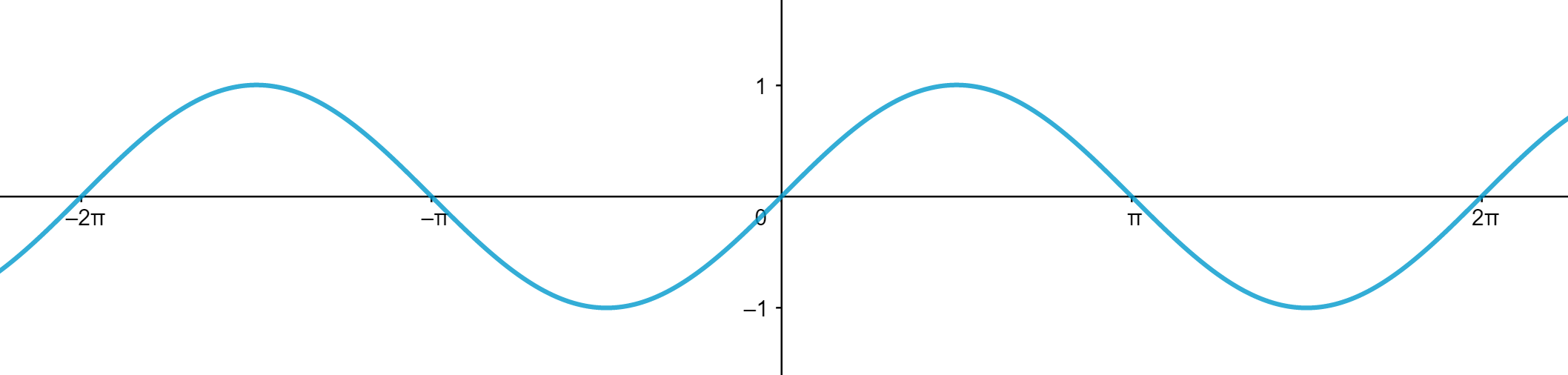
a. Périodicité
b. Parité
c.
1.4.2 Fonction cosinus
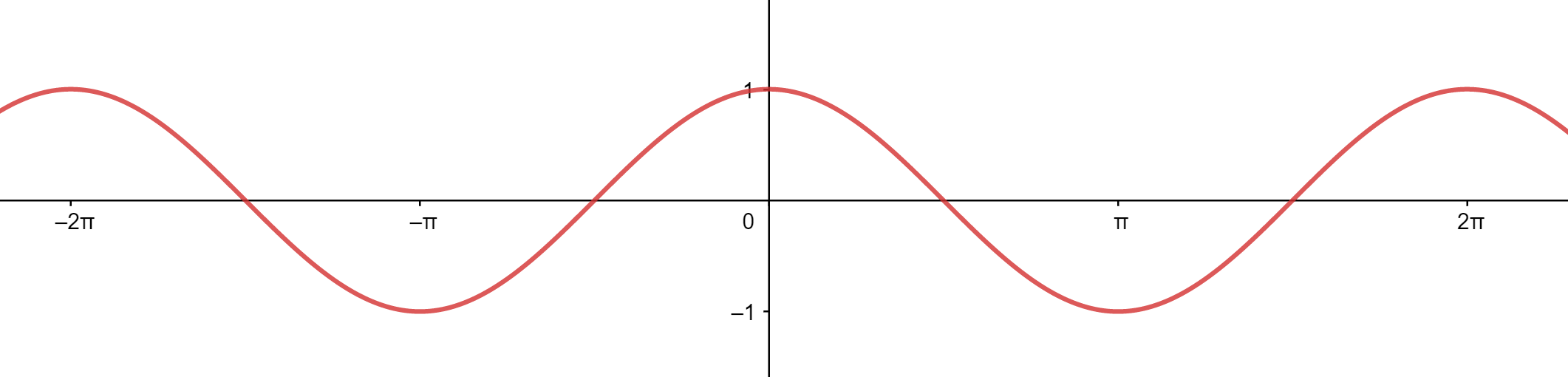
a) Périodicité
b) Parité
c)
1.4.3 Fonction tangente
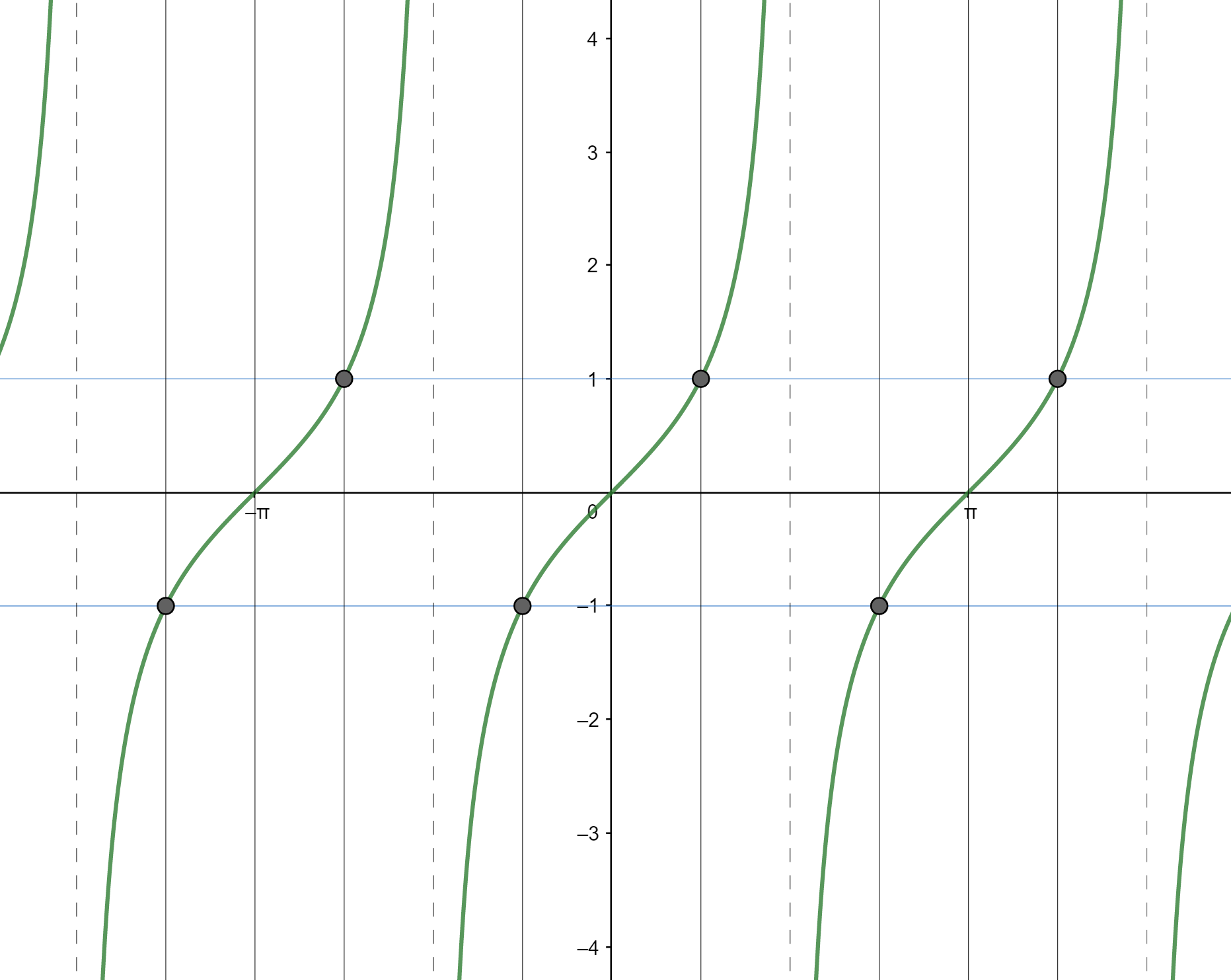
a) Périodicité
b) Parité
c)
1.4.4 Passage sinus ↔ cosinus
On peut voir sur les graphes des fonctions qu'il y a un décalage de
1.5 Fonction trigonométriques inverses
Pour définir les fonction trigonométriques inverses, il est nécessaire de restreindre les domaines de définition, car il existe un infinité de solution pour un même angle.
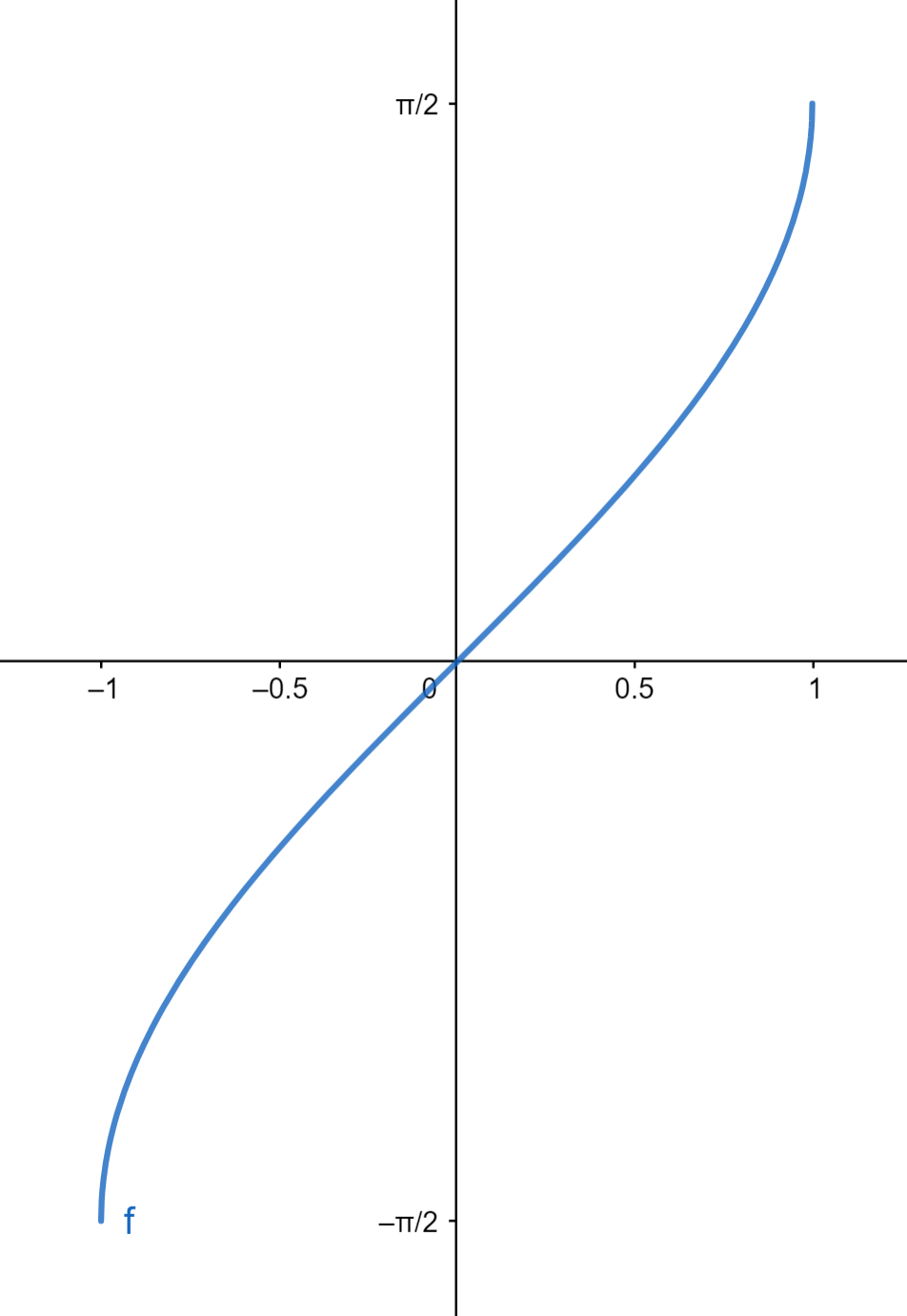
1.5.1 Fonction sinus inverse
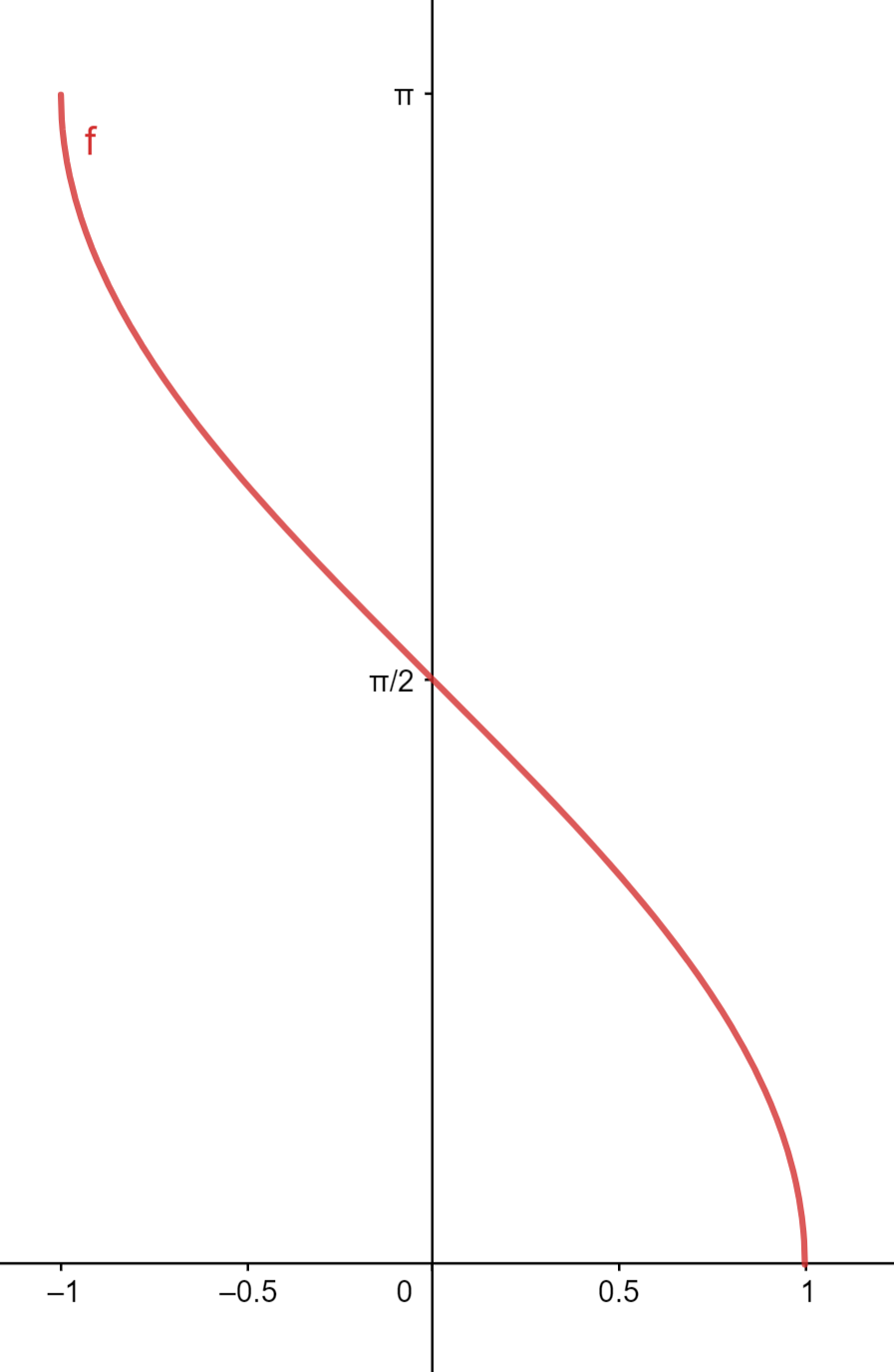
1.5.2 Fonction cosinus inverse
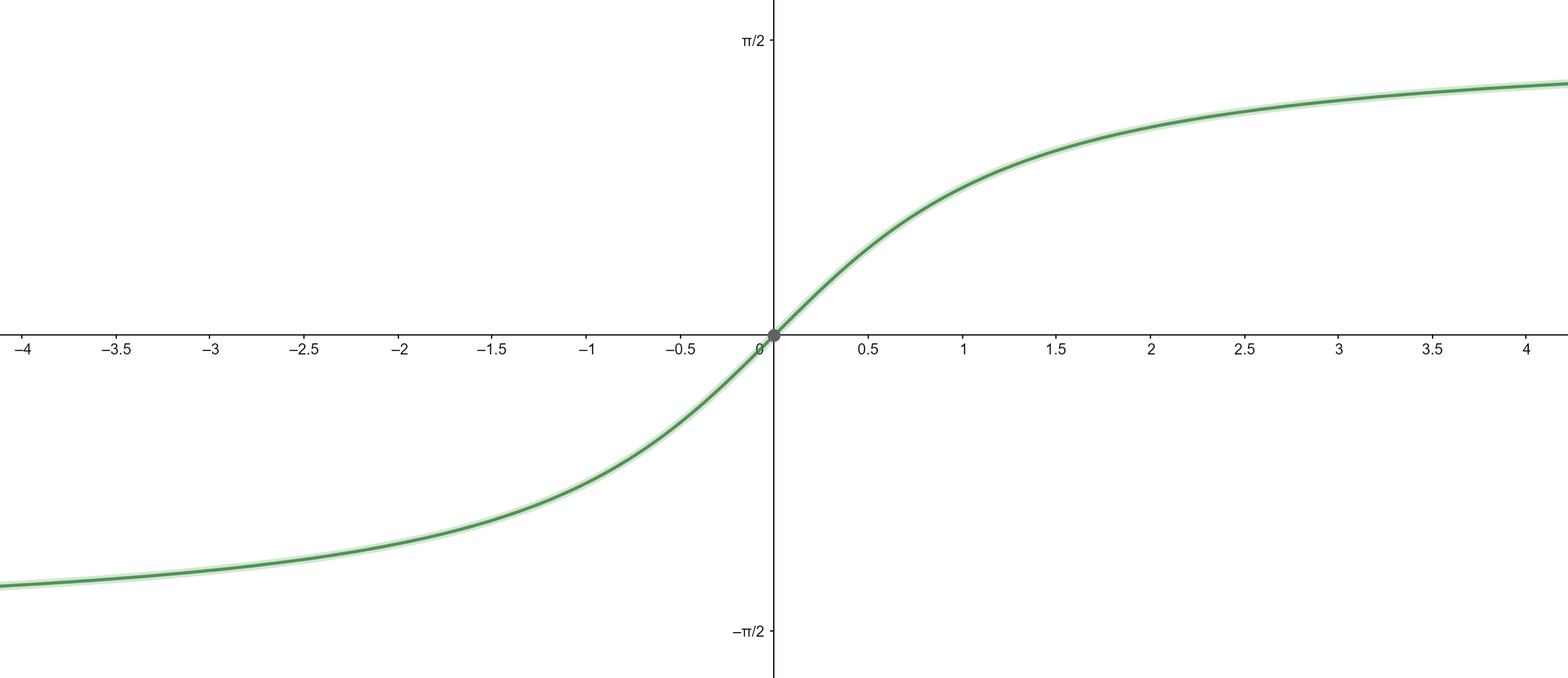
1.5.3 Fonction tangente inverse
1.6 Fonctions trigonométriques généralisées
→ les exemples sont fait avec la fonction sinus mais sont également valables pour toutes les autres fonctions trigonométriques.
1.6.1 Dilatation et compression verticale
- la multiplication de
- La position verticale ainsi que la période ne changent pas.
1.6.2 Dilatation et compression horizontale
- la multiplication de
- La position et l'amplitude ne changent pas
1.6.3 Translation verticale
En ajoutant une constante
1.6.4 Translation horizontale
En ajoutant une constante
1.6.5 Définition générale / nomenclature
Soit
| symbole | nom |
|---|---|
| amplitude | |
| décalage vertical | |
| vitesse angulaire | |
| déphasage | |
| période | |
| phase à l'origine |
1.7 Equations trigonométriques
1.7.1 Equation de base
Equation du type
Les solutions d'une équation du type
avec
Si cette condition n'est pas respectée, l'équation n'admet aucune solution. (En effet, aucune valeur d'angle ne donne un cosinus non-compris entre -1 et 1)
On a alors
On résout ensuite l'équation de cette manière :
Equation du type
Les solutions d'une équation du type
avec
Si cette condition n'est pas respectée, l'équation n'admet aucune solution. (En effet, aucune valeur d'angle ne donne un sinus non-compris entre -1 et 1)
On a alors
On résout ensuite l'équation de cette manière :
Equation du type
Les solutions d'une équation du type
Il n'y pas de restrictions sur
On résout l'équation de cette manière :
1.7.2 Equation de la forme
La résolution est la même avec les autres fonctions trigonométriques.
C'est une équation qui est fonction du sinus (ou cos, tan, ...).
Par exemple :
L'équation est dans ce cas fonction de
Pour résoudre ce type d'équation, il faut effectuer un changement de variable. On remplace la fonction trigonométrique par
Désormais, il faut résoudre l'équation de type 2e degré en
On trouve alors les solutions
On reprend alors le changement de variable et on résout comme une équation trigonométrique de base en posant
1.8 Théorèmes sur les triangles quelconques
1.8.1 Aire d'un triangle quelconque
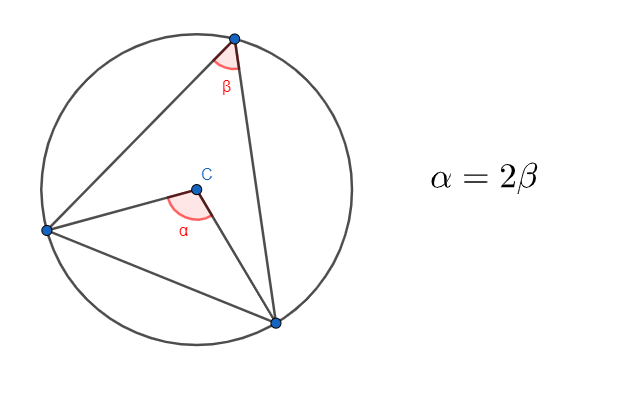
1.8.2 Théorème de l'angle inscrit
1.8.3 Théorème du sinus
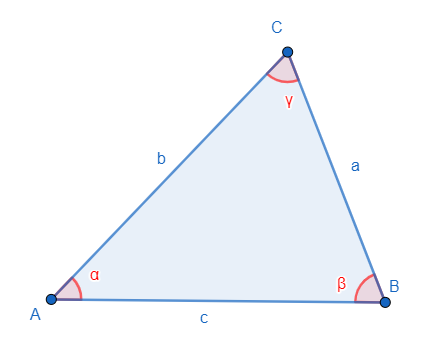
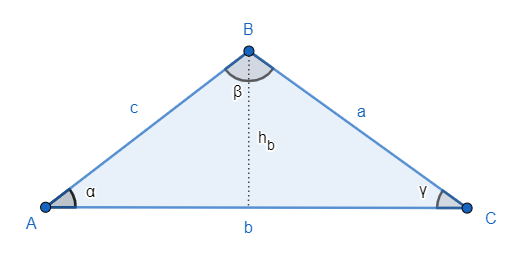
Soit un triangle quelconque
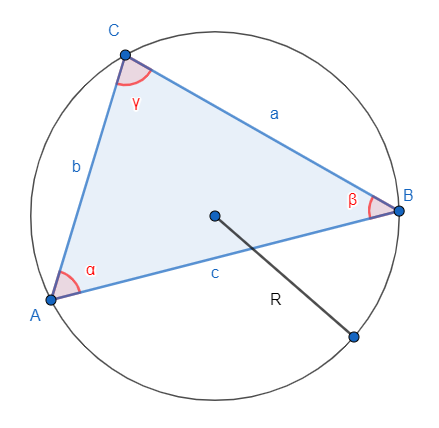
On a alors :
1.8.4 Théorème du cosinus
Soit un triangle quelconque
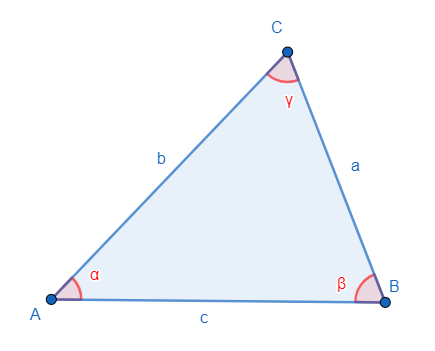
On a alors :
1.8.5 Quand utiliser les différents théorèmes
On utilise le théorème du sinus quand :
- On connait deux angles et un côté
- On connait un angle et deux côté
On utilise le théorème du cosinus quand :
- On connait les trois côtés
1.9 Formules trigonométriques
ou identités trigonométriques
Ce ne sont pas des équations mais bien des identités, les graphes d'un côté du signe égal et de l'autre sont les mêmes.
Les deux expressions sont équivalentes.
1.9.1 Formules de base
| sinus | cosinus | |
|---|---|---|
| parité | ||
| décalage de | ||
| décalage de |
Ces formules découlent directement des définitions.
1.9.2 Formules simples
| Pythagore | ||
| Thalès | ||
1.9.3 Somme et différence de deux angles
Sinus et cosinus de la somme/différence de deux angles
démonstration
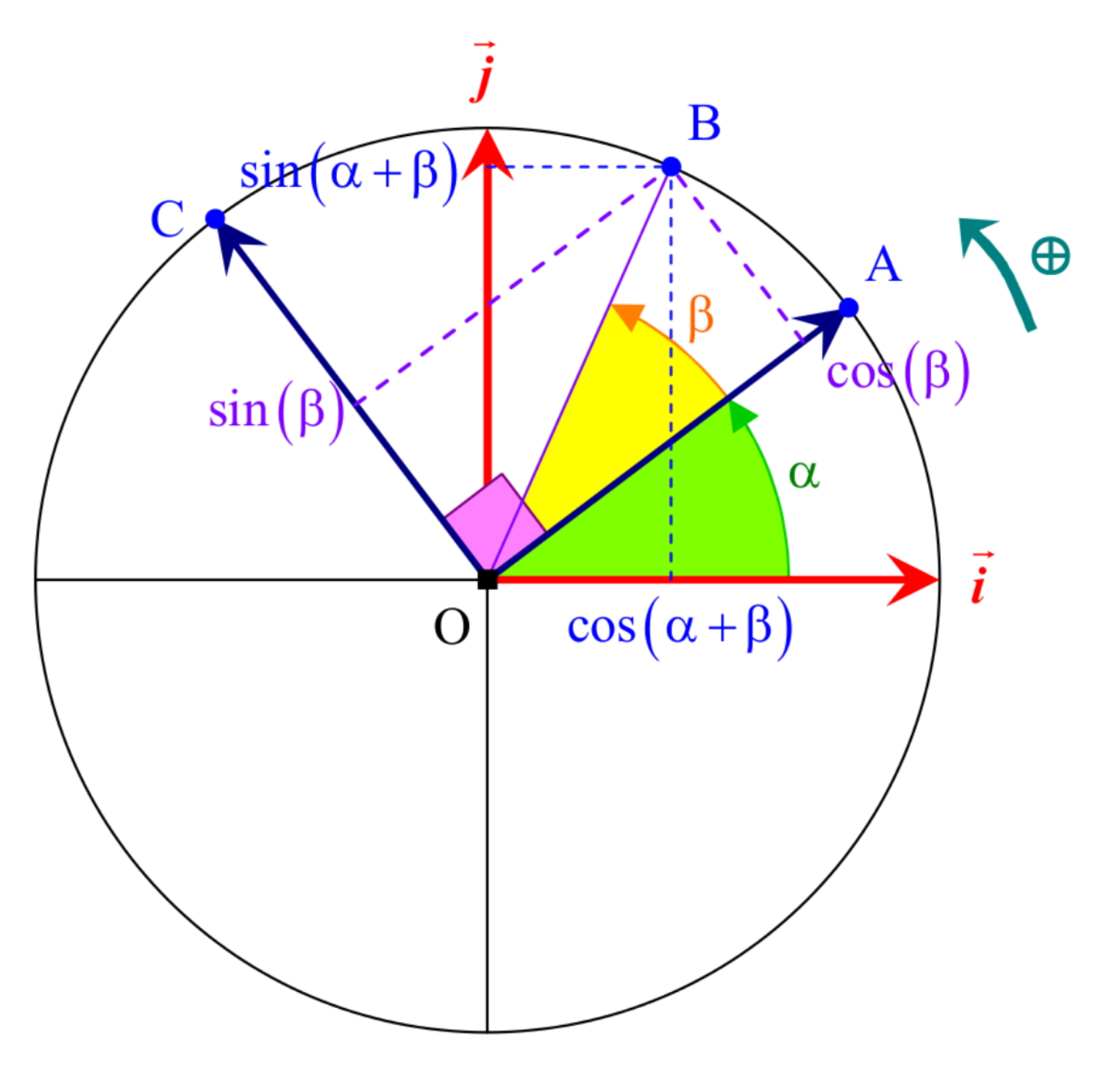
On exprime
D'après la figure,
De ces deux expressions pour
CQFD.
Tangente de la somme/différence de deux angles
1.9.4 Formules des angles doubles
1.9.5 Formules des demis-angles
1.9.6 Transformation produit → somme
1.9.7 Transformation somme → produit